Atomics And Concurrency
This is going to be a long post, but I hope you get value out of it. This wasn’t an easy topic to tackle but it was definitely worthwhile!
Hopefully, you leave with a decent understanding of how memory ordering works and how to use atomics in conjunction with memory ordering to build a lock-free queue in C++.
Note: If you want to actually compile the code and run it, make sure to do so with the TSan flag enabled for the CLang compiler. TSan is a reliable way of detecting data races in your code, instead of trying to repeatedly run the code in a loop hoping for a data race to occur.
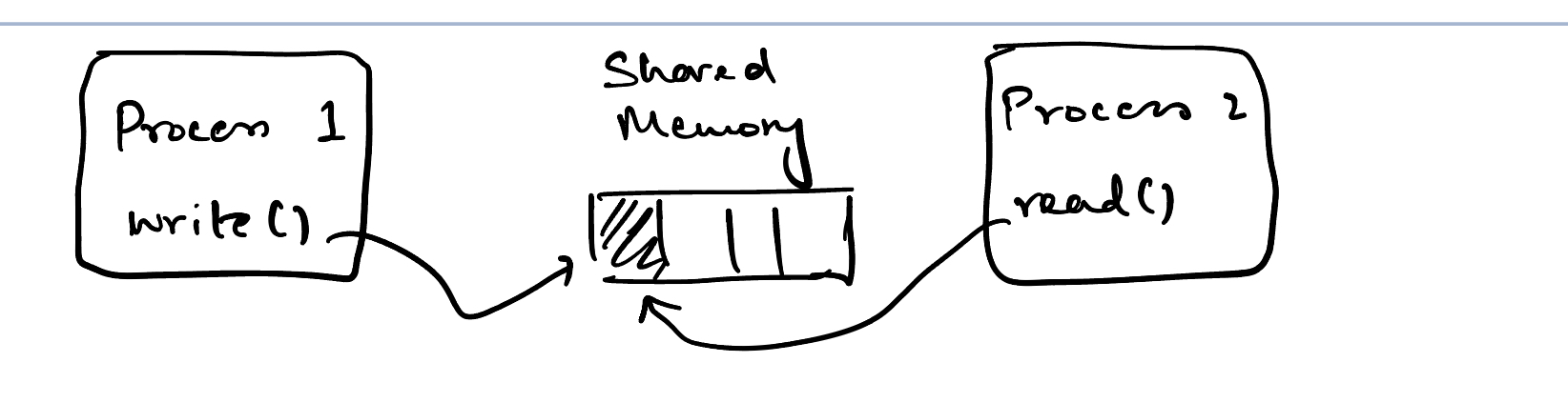
Imagine you have either some concurrent code operating on some shared data in memory. You have two threads or processes, one writing and one reading on some shared piece of state.
The “safe” way of dealing with this is mutexes. However, mutexes tend to add overhead. Atomics are a more performant but much more complicated way of dealing with concurrent operations.
Atomics
This section is very simple. Atomics are simply operations or instructions that cannot be split by the compiler or the CPU or re-ordered in any way.
The simplest possible example of an atomic in C++ is an atomic flag
#include <atomic>
std::atomic<bool> flag(false);
int main() {
flag.store(true);
assert(flag.load() == true);
}
We define an atomic boolean, initialise it and then call store on it. This method sets the value on the flag. You can then load the flag from memory and assert its value.
Operations With Atomics
The operations you can perform with atomics are straightforward:
- You can store some value into them with a
store()method. This is a write operation. - You can load some value from them with a
load()method. This is a read operation, - You can do a Compare-and-Set(CAS) with them using a
compare_exchange_weak()orcompare_exchange_strong()method. This is a read-modify-write(RMW) operation.
The important thing to remember is that each of these cannot be split into separate instructions.
Note: There are more methods available, but this is all we need for now
There are various atomics available in C++ and you can use them in combination with memory orderings.
Memory Ordering
This section is a lot more complicated and is the meat of the matter. There are some great references for understanding this I’ve linked at the bottom.
Why It Matters
The compiler and CPU are capable of re-ordering your program instructions, often independently of one another. That is, your compiler can re-order instructions and your CPU can re-order instructions again. See here.
However, this is only allowed if the compiler can definitely not establish a relationship between the two sets of instructions.
For instance, this can be re-ordered because there is no relationship between the assignment to x and the assignment to y. That is, the compiler or CPU might assign y first and then x. But, this doesn’t change the semantic meaning of your program.
int x = 10;
int y = 5;
However, the code below cannot be re-ordered because the compiler cannot establish the absence of a relationship between x and y. It’s obvious to see here because y depends on the value of x.
int x = 10;
int y = x + 1;
It doesn’t seem like a big problem until there’s multi-threaded code.
Intuition For Ordering
#include <cassert>
#include <thread>
int data = 0;
void producer() {
data = 100; // Write data
}
void consumer() {
assert(data == 100);
}
int main() {
std::thread t1(producer);
std::thread t2(consumer);
t1.join();
t2.join();
return 0;
}
The multi-threaded example above will result in a runtime error because there is a clear data race when thread 1 is trying to set the value of data and thread 2 is trying to read the value of data. The easy answer here is a mutex to protect the write & read of data but there’s a way to do this with an atomic boolean.
We loop on the atomic boolean until we find that it is set to the value we are looking for and then check the the value of data.
#include <atomic>
#include <cassert>
#include <thread>
int data = 0;
std::atomic<bool> ready(false);
void producer() {
data = 100;
ready.store(true); // Set flag
}
void consumer() {
while (!ready.load())
;
assert(data == 100);
}
int main() {
std::thread t1(producer);
std::thread t2(consumer);
t1.join();
t2.join();
return 0;
}
When you compile this with TSan, it doesn’t complain about any race conditions. Note: I’m going to refer back to why TSan doesn’t complain here.
Now, I’m going to break it by adding a memory ordering guarantee to it. Just replace ready.store(true); with ready.store(true, std::memory_order_relaxed); and replace while (!ready.load()) with while (!ready.load(std::memory_order_relaxed)).
TSan will complain that there is a data race. But, why is it complaining?
The issue here is that we have no order among the operations of the two threads anymore. The compiler or CPU is free to re-order instructions in the two threads. If we go back to our abstract visualisation from earlier, this is what it looks like now.
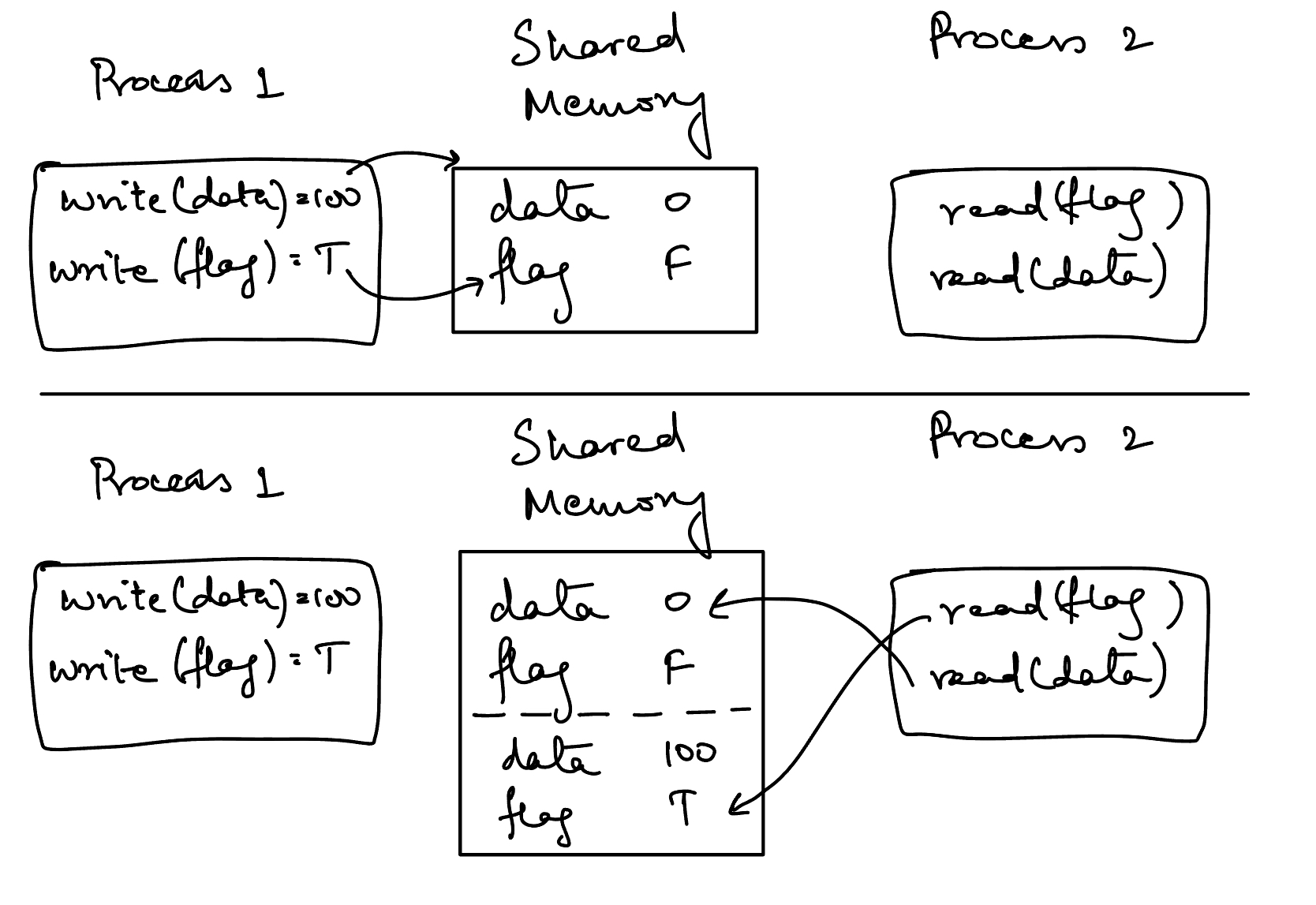
The visualisation above shows us that our two processes (threads) have no way of agreeing upon the current state or the order in which that state has changed.
Once process 2 determines that the flag has been set to true, it tries to read the value of data. But, thread 2 believes that the value of data has not yet changed even though it believes the value of flag has been set to true.
This is confusing because the classic model of interleaving concurrent operations doesn’t apply here. In the classic model of concurrent operations, there is always some order that can be established. For instance, we can say that this is one possible scenario of operations.
Thread 1 Memory Thread 2
--------- ------- ---------
| | |
| write(data, 100) | |
| -----------------------> | |
| | load(ready) == true |
| | <---------------------- |
| | |
| store(ready, true) | |
| -----------------------> | |
| | |
| | read(data) |
| | <---------------------- |
| | |
But, the above graphic assumes that both threads have agreed upon some global order of events, which isn’t true at all anymore! This is still confusing for me to wrap my head around.
In a memory_order_relaxed mode, two threads have no way of agreeing upon the order of operations on shared variables. From thread 1’s point of view, the operations it executed were
write(data, 100)
store(ready, true)
However, from thread 2’s point of view, the order of operations it saw thread 1 execute were
store(ready, true)
write(data, 100)
Without agreeing upon the order in which operations occurred on shared variables, it isn’t safe to make changes to those variables across threads.
Okay, let’s fix the code by replacing std::memory_order_relax with std::memory_order_seq_cst.
So, ready.store(true, std::memory_order_relaxed); becomes ready.store(true, std::memory_order_seq_cst); and while (!ready.load(std::memory_order_relaxed)) becomes while (!ready.load(std::memory_order_seq_cst)).
If you run this again with TSan, there are no more data races. But why did that fix it?
Memory Barrier
So, we saw our problem earlier was about two threads being unable to agree upon a single view of events and we wanted to prevent that. So, we introduced a barrier using sequential consistency.
Thread 1 Memory Thread 2
--------- ------- ---------
| | |
| write(data, 100) | |
| -----------------------> | |
| | |
| ================Memory Barrier=================== |
| store(ready, true) | |
| -----------------------> | |
| | load(ready) == true |
| | <---------------------- |
| ================Memory Barrier=================== |
| | |
| | read(data) |
| | <---------------------- |
| | |
The memory barrier here says that nothing before the store operation and nothing after the load operation can be re-ordered. That is, thread 2 now has a guarantee that the compiler or the CPU will not place the write to data after the write to the flag in thread 1. Similarly, the read operation in thread 2 cannot be re-ordered above the memory barrier.
The region inside the memory barrier is akin to a critical section that a thread needs to a mutex to enter. We now have a way to synchronise the two threads on the order of events across them.
This brings us back to our classic model of interleaving in concurrency because we now have an order of events both threads agree upon.
Types Of Memory Order
There are 3 main types of memory order:
- Relaxed memory model (std::memory_order_relaxed)
- Release-acquire memory model (std::memory_order_release and std::memory_order_acquire)
- Sequentially consistent memory order (std::memory_order_seq_cst)
We already covered 1 & 3 in the examples above. The second memory model literally lies between the other two in terms of consistency.
#include <atomic>
#include <cassert>
#include <iostream>
#include <thread>
int data = 0;
std::atomic<bool> ready(false);
void producer() {
data = 100;
ready.store(true, std::memory_order_release); // Set flag
}
void consumer() {
while (!ready.load(std::memory_order_acquire))
;
assert(data == 100);
}
int main() {
std::thread t1(producer);
std::thread t2(consumer);
t1.join();
t2.join();
return 0;
}
The above is the same example from earlier, expect with std::memory_order_release used for ready.store() and memory_order_acquire used for read.load(). The intuition here for ordering is similar to the pervious memory barrier example.
Except, this time the memory barrier is formed on the pair of ready.store() and ready.load() operations and will only work when used on the same atomic variable across threads. Assuming you have a variable x being modified across 2 threads, you could do x.store(std::memory_order_release) in thread 1 and x.load(std::memory_order_acquire) in thread 2 and you would have a synchronization point across the two threads on this variable.
The difference between the sequentially consistent model and the release-acquire model is that the former enforces a global order of operations across all threads, while the latter enforces an order only among pairs of release and acquire operations.
Now, we can revisit why TSan didn’t complain about a data race initially when there was no memory order specified. It’s because C++ by default assumes a std::memory_order_seq_cst when no memory order is specified. Since this is the strongest memory model, there is no data race possible.
Hardware Considerations
Different memory models have different performance penalties on different hardware.
For instance, the x86 architectures instruction set implements something called total store ordering (TSO). The gist of it is that the model resembles all threads reading and writing to a shared memory. You can read more here
This means that the x86 processors can provide sequential consistency for a relatively low computational penalty.
On the other side are the ARM family of processors has a weakly ordered instruction set architecture. This is because each thread or process reads and writes to its own memory. Again, the link above provides context.
This means that the ARM processors provide sequential consistency for a much higher computational penalty.
Building A Concurrent Queue
I’m going to use the operations we have discussed so far to build the basic operations of a lock-free concurrent queue. This is by no means even a complete implementation, just my attempt to re-create something basic using atomics.
I’m going to represent the queue using a linked list and wrap each node inside an atomic.
class lock_free_queue {
private:
struct node {
std::shared_ptr<T> data;
std::atomic<node*> next;
node() : next(nullptr) {} // initialise the node
};
std::atomic<node*> head;
std::atomic<node*> tail;
}
Now, for the enqueue operation, this is what its going to look like
void enqueue(T value) {
std::shared_ptr<T> new_data = std::make_shared<T>(value);
node* new_node = new node();
new_node->data = new_data;
// do an infinite loop to change the tail
while (true) {
node* current_tail = this->tail.load(std::memory_order_acquire);
node* tail_next = current_tail->next;
// everything is correct so far, attempt the swap
if (current_tail->next.compare_exchange_strong(
tail_next, new_node, std::memory_order_release)) {
this->tail = new_node;
break;
}
}
}
The main focus is on the load and compare_exchange_strong operations. The load works with a acquire and the CAS works with a release so that reads and writes to the tail are synchronized.
Similarly for the dequeue operation
std::shared_ptr<T> dequeue() {
std::shared_ptr<T> return_value = nullptr;
// do an infinite loop the change the head
while (true) {
node* current_head = this->head.load(std::memory_order_acquire);
node* next_node = current_head->next;
if (this->head.compare_exchange_strong(current_head, next_node,
std::memory_order_release)) {
return_value.swap(next_node->data);
delete current_head;
break;
}
}
return return_value;
}
Note: This queue doesn’t handle the ABA problem. This blog post is too long to bring in hazard pointers, so I’m leaving that out
So there you have it. Atomics in C++. Very complicated and there is zero chance I’d ever put this into production. Especially because I’m fairly certain my concurrent queue would break ;-)
If you want access to the code mentioned above, look at this file and this file.
Notes
Here are some articles and links which I found helpful while writing this blog:
- Understanding Atomics And Memory Ordering
- The memory order reference from cppreference
- Atomics on the GCC Wiki
- Memory Ordering At Compile Time
- Memory Barriers From The Linux Kernel Documentation -> This one is especially helpful
- ArangoDB’s blog on memory barriers in C++
- The Danger Of Atomic Operations